












Flyknit ဖိနပ် Upper Flat Knitting စက်
မော်ဒယ်:SF3-52S
Fly knit Shoe Upper Flat Knitting Machine အမျိုးအစားသည် တွဲလျားသုံးလုံးပါသော စနစ်တစ်ခုဖြစ်သည်။ မော်တာအပြည့်ပါသည့် 5.2-လက်မ အလွန်သေးငယ်သောရထား၊ မော်တော်ယာဥ်အပြောင်းအရွှေ့ကင်မရာ၊ လျင်မြန်စွာပြန်လာခြင်း၊ အပ်များလွှဲပြောင်းသည့်အခါ တွန်းလှည်းသည် မစောင့်ဘဲ၊ ရထားလမ်းကြောင်းနှင့် လမ်းစကို ထိရောက်စွာလျှော့ချနိုင်ပြီး စက်တည်ငြိမ်မှုနှင့် စွမ်းဆောင်ရည်ကို များစွာတိုးတက်စေသည်။ မော်တာအရေအတွက် မတိုးစေဘဲ အဆင့်နှစ်ဆင့်ရှိသော ချုပ်ရိုးအသစ်သည် ပင်မနှင့် အရန်ချုပ်ချုပ်၏ သီးခြားထိန်းချုပ်မှုကို သဘောပေါက်သည်။ ရွေ့လျားနေသောချုပ်ရိုးနှင့် နှိုင်းယှဉ်ပါက Fly knit Shoe Upper Flat Knitting Machine သည် အထည်များအတွက် မတူညီသောဖောက်သည်များ၏ မြင့်မားသောလိုအပ်ချက်များကို ပြည့်မီစေရန်အတွက် အပ်တစ်ချောင်းကို ချုပ်ရိုးပြောင်းလဲမှုနှင့် ပိုကျယ်သော သိပ်သည်းမှုအတိုင်းအတာကို ရရှိနိုင်သည်။ ချိန်ညှိနိုင်သော တင်းကျပ်သော tuck လုပ်ဆောင်ချက်သည် vamp ၏ တင်းကျပ်သော tuck သိပ်သည်းဆနှင့် တင်းကျပ်မှုကို ဖြည့်ဆည်းနိုင်ပြီး vamp ၏ သုံးဖက်မြင်ခံစားမှုကို မြှင့်တင်ပေးပါသည်။ Sinkers များကိုဖြတ်ကျော်နိုင်သည်၊ ၎င်းသည် စွန့်ပစ်ချည်မျှင်မပါဘဲ စတင်ထိုးခြင်း၏လုပ်ဆောင်ချက်ကို သိရှိနိုင်ပြီး ချည်ကုန်ကျစရိတ်ကို သက်သာစေပါသည်။ ၎င်းကို presser yarn ကိရိယာနှင့် တွဲသုံးသောအခါ၊ ၎င်းသည် vamp အား ပိုမိုပြည့်နှင့် ထူလာစေသည်။



| အတိုင်းအတာ | 14G |
| အကျယ် | ၃၆လက်မ/၅၂လက်မ/၇၂လက်မ |
| ချည်ထိုးစနစ် | နှစ်ထပ်စနစ်/သုံးဆစနစ်များဖြင့် တစ်ခုတည်းသောရထား |
| ချည်ထိုးအရှိန် | အမြင့်ဆုံးမြန်နှုန်း 1.6 m/sec |
| ပြိုင်ကား | မော်တာမောင်း၊ အများဆုံး 2 လက်မအတွင်း racking |
| Needlle actuator | 8 အပိုင်း အီလက်ထရွန်းနစ် ဆေးထိုးအပ် actuator |
| Sinker စနစ် | 6 stepping motor ဖြင့် ထိန်းချုပ်ထားသော လွတ်လပ်သော အသိဉာဏ်ပစ္စည်းမူပိုင်ခွင့်ဆိုင်ရာ sinker စနစ်၊ မတူညီသော sinking pressure ls သည် မတူညီသော စနစ်များအတွက် အထည်၏ မတူညီသော ချည်ထိုးနည်းများကို အခြေခံ၍ အမျိုးမျိုးသော ပုံသဏ္ဍာန်နှင့် ထပ်ပေါင်းခြင်းတို့ကို ရရှိနိုင်ပါသည်။ |
| အကာအကွယ် | ချည်မျှင်၊ ချည်ရိုးထုံး၊ သုတ်ခြင်း၊ ကွဲထွက်ခြင်း၊ ပြီးစီးခြင်း၊ ဝန်ပိုခြင်း၊ သတ်မှတ်စတင်ခြင်းနှင့် ရပ်တန့်ခြင်း၊ ပရိုဂရမ် အမှားအယွင်းရှိပါက အလိုအလျောက်ရပ်တန့်သည့်ကိရိယာ |
| ချည်ခင် ကိရိယာ | ချည်သားအစာနှင့် ချည်မျှင်သိုလှောင်သည့်ကိရိယာ (ချန်လှပ်ထားနိုင်သည်)၊ အထည်၏ အလုံးစုံအရည်အသွေးကို သေချာစေရန် ချည်သားတင်းမာမှုကို တိကျစွာထိန်းချုပ်ခြင်း၊ |
| ဘေးကင်းရေးကိရိယာ | ဆူညံသံနှင့် ဖုန်မှုန့်များကို လျှော့ချရန်အတွက် စက်အဖုံးတစ်ခုလုံး၊ အကာအကွယ်အဖုံးတွင် ရပ်တန့်ခြင်းအာရုံခံကိရိယာ၊ အရေးပေါ်ရပ်တန့်ခြင်း၊ ပါဝါပိတ်ကိရိယာ တပ်ဆင်ထားပါသည်။ |
| ကြိတ်စက်ကိရိယာ | အဆင့်မြင့် Roller ၊ အပိုင်းခွဲ ချိန်ညှိခြင်း။ |
| မော်တာချိတ်ဆက်တံ | မော်တာချိတ်ဆက်တံဖြင့် မောင်းနှင်ပြီး နောက်ပြန်လှည့်ခြင်းကို ပိုမိုတိကျသည်။ |
| တင်းတင်းကျပ်ကျပ် | Tight hanging triangle ကို မော်တာဖြင့် ထိန်းချုပ်ထားပြီး၊ တင်းကျပ်သော တွဲလောင်း၏ မတူညီသော ဒီဂရီများ ရရှိစေရန် |
| အရွယ်အစားနှင့်အလေးချိန် | အရွယ်အစား-LXWXH 2600X955X2010/2970X955×2010/3370×955×2010mm အလေးချိန်: 950/1145/1250kg |
| ပါဝါ | ဗို့အား- AC 220V/380V ကြိမ်နှုန်း- 50HZ/60HZ ပါဝါ- 1.5KW |
-
 Display မျက်နှာပြင်
Display မျက်နှာပြင်၎င်းသည် ဂရပ်ဖစ်ထိတွေ့ထိန်းချုပ်မှု၊ အရောင်မျိုးစုံ၊ ချည်ထည်ပမာဏ၊ အချိန်၊ အမြန်နှုန်း၊ ကြိတ်စက်၊ သိပ်သည်းဆ၊ ချည်မျှင်သယ်ဆောင်သည့်ကိရိယာစသည်ဖြင့် ပြသနိုင်သော စက်မှုလုပ်ငန်း LCD display ကို အသုံးပြုထားသည်။
-
 ချည်ထည် သိုလှောင်မှု
ချည်ထည် သိုလှောင်မှုအပြုသဘောဆောင်သော ချည်မျှင်ပံ့ပိုးပေးသူသည် ချည်မျှင်အစာကျွေးခြင်းခံနိုင်ရည်အား ထိရောက်စွာ လျှော့ချနိုင်သည်၊ အထူးသဖြင့် မျှင်မျှင်နိမ့်သော ချည်မျှင်တင်းတင်းကျပ်ကျပ် ယက်လုပ်ထားသော အပေါ်ပိုင်းများအတွက် အထူးသင့်လျော်သည်၊ အပေါ်ပိုင်းများကို ချောမွေ့စေကာ စက်သည် ပင်အပ်ဆုံးရှုံးမှုနည်းပါသည်။
-
 Servo မော်တာ
Servo မော်တာစက်စနစ်အသုံးပြု၍ CAN ဆက်သွယ်ရေးထိန်းချုပ်မှု ဆာဗာဒရိုင်ဘာကို အသုံးပြု၍ စက်ရထား၏ မြန်နှုန်းမြင့်လည်ပတ်မှုကို နားလည်သဘောပေါက်ကာ အလွန်မြန်သောရထားပြန်အလာမှာ တည်ငြိမ်နေပြီး တွဲချည်ထိုးခြင်းစွမ်းဆောင်ရည်ကို 2% တိုးတက်စေသည်။
-
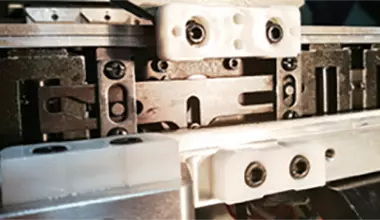
 ချုပ်ရိုးမော်တော်
ချုပ်ရိုးမော်တော်ဒိုင်းနမစ်ချုပ်ရိုးလုပ်ဆောင်ချက်ဖြင့်၊ မြန်နှုန်းမြင့် stepping motor ကိုအသုံးပြုခြင်းဖြင့်၊ multi-segment stitch function ကို သင်တန်းတစ်ခုတည်းတွင် အောင်မြင်နိုင်ပါသည်။
-
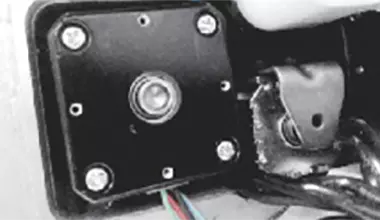
 Motorized Inversion Bar
Motorized Inversion BarStepper motor drive ပြောင်းပြန်လှန်ဘား၊ ၎င်းသည် carriage return distance ကိုလျှော့ချပြီး carriage return တိကျမှုနှင့် ထိရောက်မှုကို တိုးတက်စေသည်။
-
 ချိန်ညှိနိုင်သော Tight Tuck
ချိန်ညှိနိုင်သော Tight Tuckကွဲပြားသော အပေါ်ပိုင်းပုံစံများကို ပေါ်လွင်စေသည့် တင်းကျပ်စွာ ချည်ထည်နှင့် တင်းကျပ်သော တင်းကျပ်သည့် လုပ်ဆောင်ချက်ကို ရရှိရန် အမှန်တကယ် လိုအပ်ချက်များနှင့်အညီ ချိန်ညှိနိုင်သော တင်းကျပ်သော tuck လုပ်ဆောင်ချက်။
-
 အလွန်သေးငယ်သောရထား၏ဒီဇိုင်း
အလွန်သေးငယ်သောရထား၏ဒီဇိုင်းစက်ရထား၏အရွယ်အစားကို ပိုမိုကောင်းမွန်အောင်ပြုလုပ်ပါ၊ လှည်းပြန်အကွာအဝေးကို လျှော့ချကာ ထိရောက်မှု 5-8% တိုးတက်စေပါသည်။
-
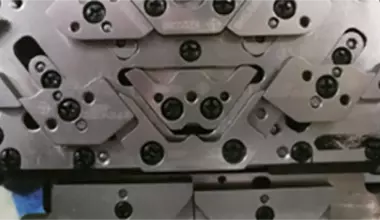
 Motorized CAM ဒီဇိုင်း
Motorized CAM ဒီဇိုင်းCAM လုပ်ဆောင်ချက်ကို ထိန်းချုပ်ရန်နှင့် ထိရောက်စွာ ထောက်လှမ်းရန်အတွက် မော်တာဒရိုက်ကို အီလက်ထရွန်းနစ်အစား မော်တာဒရိုက်ကို အသုံးပြုပါသည်။ CAM စက်ပိုင်းဆိုင်ရာ ကပ်ခြင်းကြောင့် အပ်များ ပျက်စီးခြင်း။
-
 စည်းဝေးပွဲ
စည်းဝေးပွဲ -
 Pebugging
Pebugging -
 ထုပ်ပိုးခြင်း။
ထုပ်ပိုးခြင်း။ -
 လမ်းပန်းဆက်သွယ်ရေး
လမ်းပန်းဆက်သွယ်ရေး












